
Описание проекта
Система для автоматического распознавания промаркированных объектов нарезания на полиграфическом (отпечатанном) материале с помощью камеры высокого разрешения, размещенной над рабочей поверхностью плоттера.
Команда компании Volya разработала высокоэффективные алгоритмы для обеспечения машинного зрения режущего оборудования с применением методов машинного обучения.
Назначение системы
Программное обеспечение автоматизирует изготовление продукции, сводя к минимуму необходимые ручные операции. Значительно ускоряет процесс нарезки. Уменьшает износ механизмов резца за счет устранения необходимости делать поиск регистрационных меток камерой на режущем механизме.
О клиенте
ведущий мировой производитель многофункционального цифрового оборудования для резки (планшетных режущих плоттеров)
Штаб-квартира:
Альтштеттен (Швейцария)
Машинное обучение
Алгоритмы интеллектуального распознавания способны реконструировать недостающие регистрационные метки, например, прикрытые картером, а также адаптироваться к изменениям условий распознавания (освещенности и теням, форме материала, качеству полиграфии). Автономная работа возможна и при отсутствии заданных шаблонов меток, а также при отсутствии меток вообще, в случае размещения материала полиграфией вниз. В таких ситуациях применяется распознавание краев материала.
Эффективность системы
- Все метки на рабочей поверхности планшета размером 6 на 3 м. распознаются одновременно всего за 4-7 сек. благодаря специальной системе алгоритмов;
- Общее количество меток, количество объектов для вырезки и их положение не влияют на скорость распознавания, что существенно повышает производительность оборудования;
- Ориентация материала не имеет значения для точной вырезки, это ощутимо облегчает и ускоряет все ручные операции.
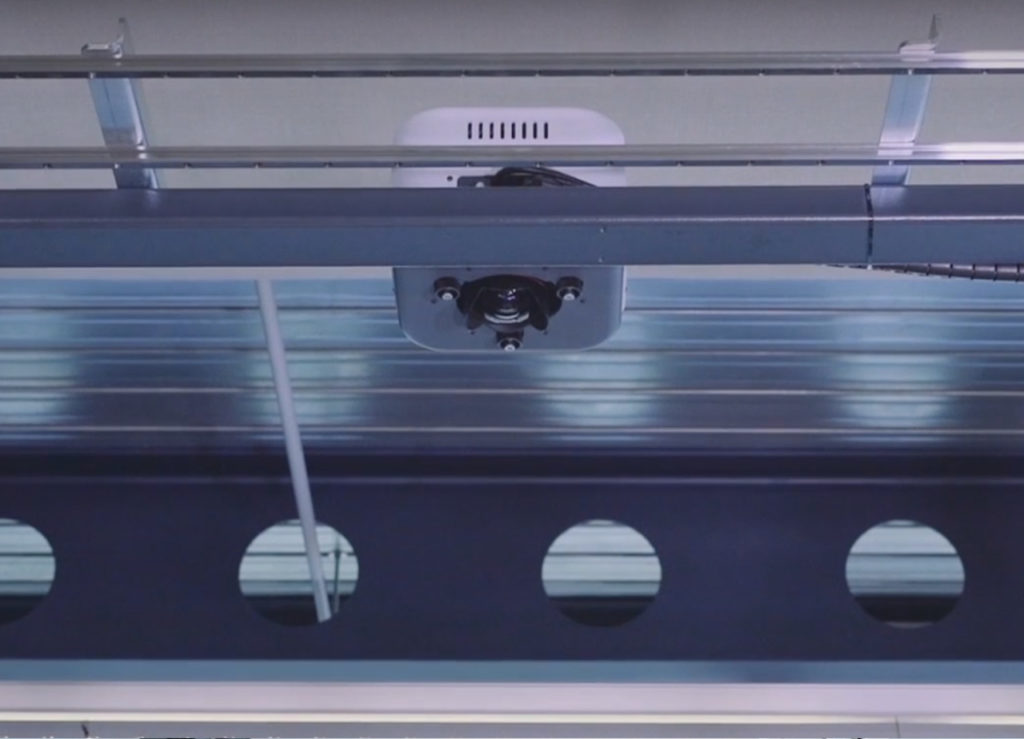
Камера высокого разрешения над рабочим планшетом
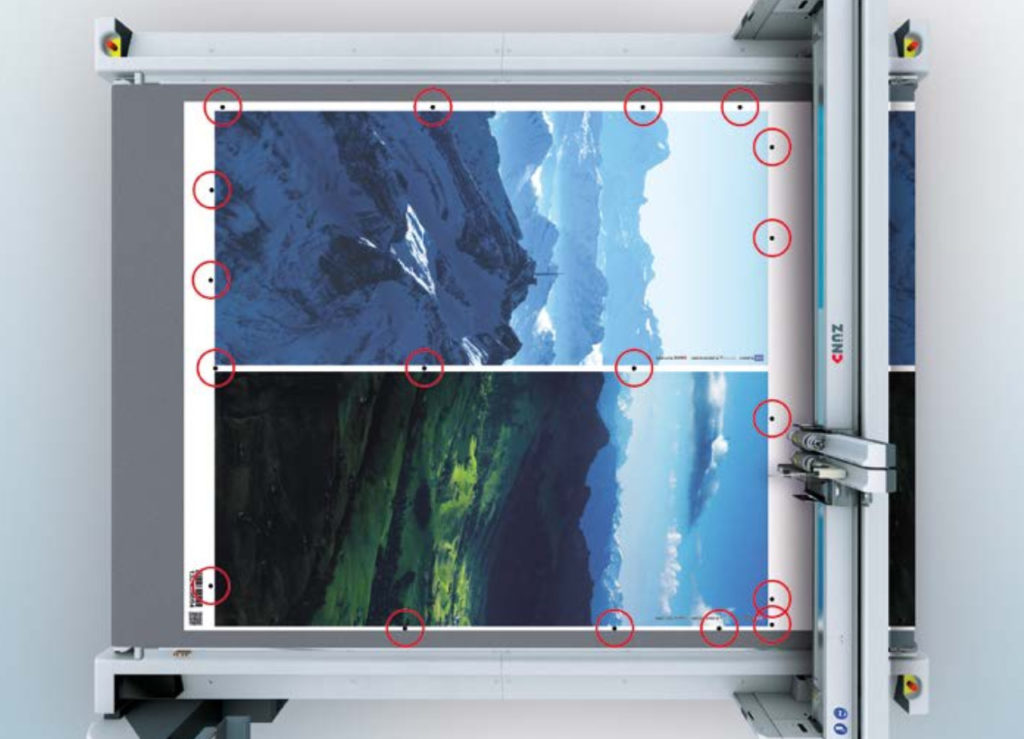
Регистрационные метки распознаются одним снимком
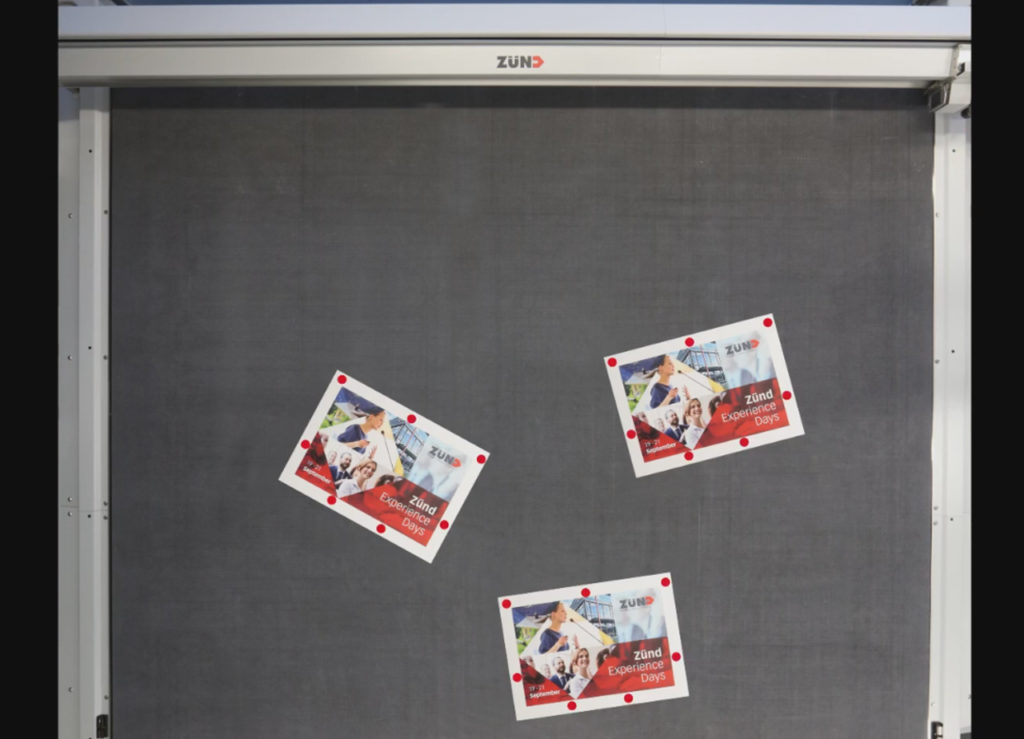
Размещение листов в произвольном порядке

Вырезка начинается через считанные секунды
Использованные технологии

Язык программирования: С/С ++. Графический интерфейс пользователя (GUI) создан при помощи Qt Framework. Калибровка основана на алгоритмах OpenCV. В качестве вспомогательного алгоритма идентификации джобов использовался Coherent Point Drift (CPD). В проекте также использовалась библиотека Eigen (библиотека линейной алгебры для C++), Inter Process Communications (IPC), Component Object Model Technologies (COM).
Как это работает
Комментарии представителя клиента
Проект касается машинного зрения. На основе изображений с камеры высокого разрешения, положение объектов определяется быстро и точно, обнаруживая метки регистра на изображении. Совместная работа с молодыми разработчиками команды «Volya» является простой, быстрой и согласованной. Наши идеи и пожелания выполняются, разработчики «Volya» проактивно подходят к решению задач. Особенно хочу отметить короткое время реакции на наши запросы.


